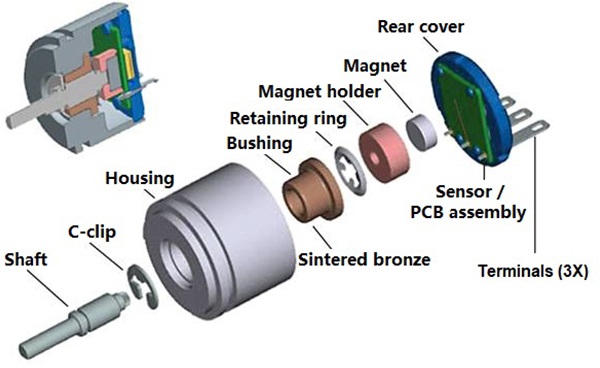
Ako imate priliku rastaviti magnetski rotacijski enkoder, obično ćete vidjeti unutarnju strukturu poput one prikazane gore. Magnetski enkoder sastoji se od mehaničke osovine, strukture školjke, PCB sklopa na kraju enkodera i malogdisk magnetrotirajući s osovinom na kraju mehaničke osovine.
Kako magnetski koder mjeri povratnu informaciju o položaju rotacije?
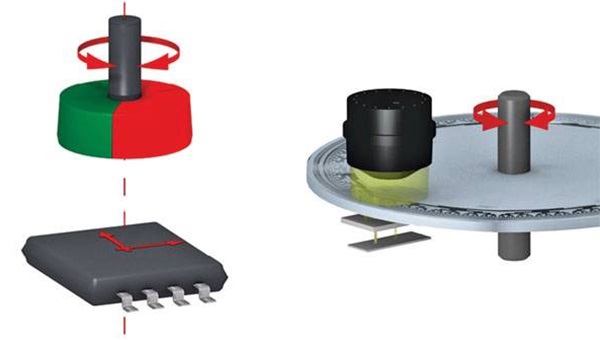
Hallov efekt: stvaranje razlike potencijala preko vodiča kroz koji teče električna struja kada se magnetsko polje primjenjuje u smjeru okomitom na smjer struje.
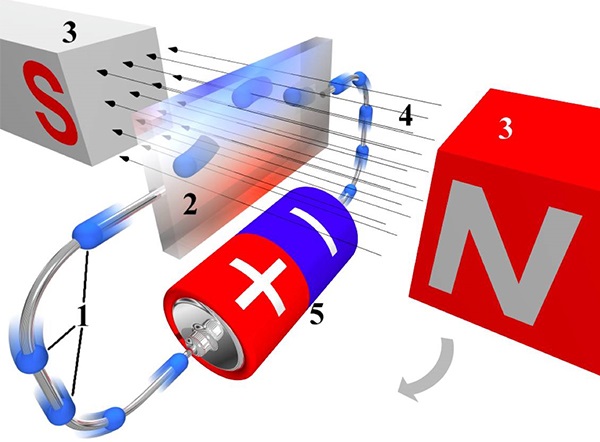
Ako se magnetsko polje primijenjeno na vodič okrene u smjeru prikazanom gornjom strelicom s strujnim putem kao osi, Hallova potencijalna razlika će se promijeniti zbog promjene kuta između magnetskog polja i vodiča, a trend promjene potencijalne razlike je sinusna krivulja. Prema tome, na temelju napona na obje strane vodiča pod naponom, kut rotacije magnetskog polja može se izračunati obrnuto. Ovo je osnovni radni mehanizam magnetskog enkodera pri mjerenju povratne informacije o položaju rotacije.
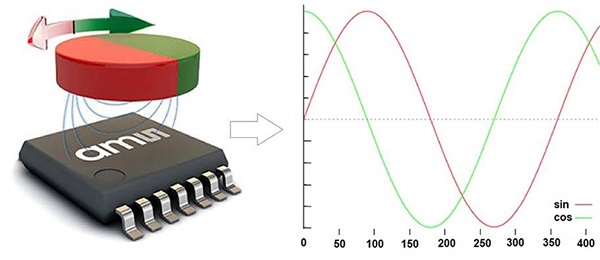
Slično načelu da rezolver koristi dva skupa međusobno okomitih izlaznih zavojnica, dva (ili dva para) Hallovih indukcijskih elemenata s međusobno okomitim smjerovima struje također su potrebna u magnetskom koderu kako bi se osigurala jedinstvena korespondencija između položaja rotacije magnetskog polja i izlazni napon (kombinacija).
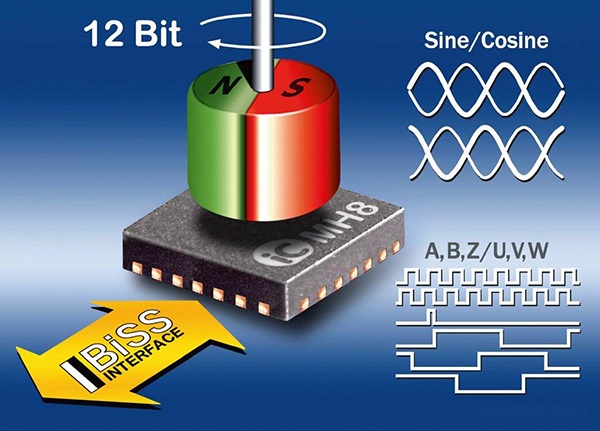
Danas, Hallovi senzori (čipovi) koji se koriste u magnetskim koderima općenito imaju visok stupanj integracije, koji ne samo da integrira Hallove poluvodičke komponente i srodne krugove za obradu i regulaciju signala, već također integrira različite vrste izlaznih modula signala, kao što su sinusni i kosinusni analogni signali, pravokutni signali digitalne razine ili izlazne jedinice sabirnice.
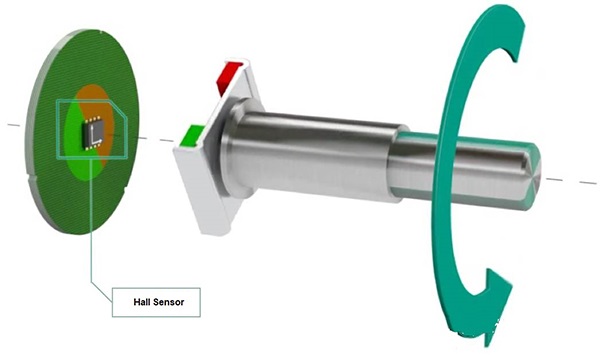
Na taj način, instalirajte trajni magnet poput sinteriranog neodimijskog magneta koji stvara magnetsko polje na kraju rotirajućeg vratila kodera, postavite gore spomenuti čip Hallovog senzora na PCB ploču i približite se permanentnom magnetu na kraju kodera osovine prema određenim zahtjevima (smjer i udaljenost).
Analizom izlaznog naponskog signala iz Hallovog senzora kroz PCB ploču, može se identificirati rotirajući položaj rotora kodera.
Struktura i princip rada magnetskog koda određuju posebne zahtjeve za ovaj permanentni magnet, na primjer materijal magneta, oblik magneta, smjer magnetizacije itd. Običnodijametralno magnetiziran neodimijski magnetdisk je najbolja opcija magneta. Ningbo Horizon Magnetics ima iskustva u opskrbi mnogih proizvođača magnetskih kodova s određenim veličinamadijametralni neodimijski disk magneti, D6x2.5mm i D10x2.5mm dijametralni disk Neodimijski magneti od kojih su najpopularniji modeli.
Može se vidjeti da u usporedbi s tradicionalnim optičkim koderom, magnetski koder ne treba složeni kodni disk i izvor svjetla, broj komponenti je manji, a struktura detekcije je jednostavnija. Štoviše, sam Hall element također ima mnoge prednosti, poput čvrste strukture, male veličine, male težine, dugog vijeka trajanja, otpornosti na vibracije, ne boji se prašine, ulja, vodene pare i onečišćenja slanom maglom ili čeka korozije.
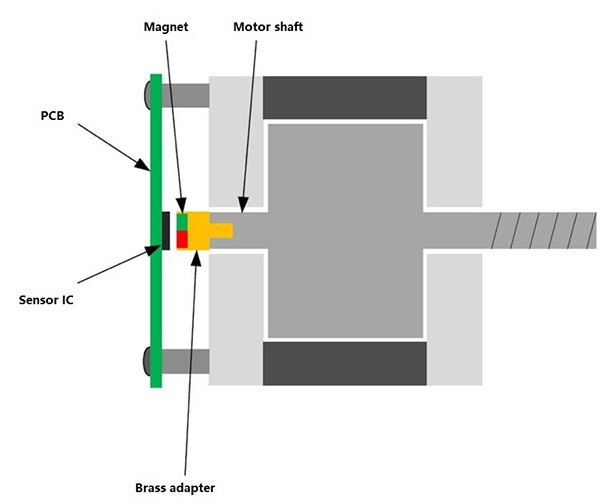
Kada se tehnologija magnetskog kodera primijeni na povratnu informaciju o položaju rotacije elektromotora,sinterirani NdFeB magnetski cilindarmagnetskog enkodera može se ugraditi izravno na kraj osovine motora. Na taj način može eliminirati prijelazni spojni ležaj (ili spojku) koji je potreban kada se koristi tradicionalni koder s povratnom spregom i postići beskontaktno mjerenje položaja, što smanjuje rizik od kvara (ili čak oštećenja) kodera zbog vibracija mehaničke osovine tijekom rad elektromotora. Stoga pomaže u poboljšanju stabilnosti rada elektromotora.
Vrijeme objave: 21. srpnja 2022